仅需5000美元就能实现人形机器人3D打印?
UC伯克利这次又又又整新活了!
注意看,画面中这个正在认真写名字的小家伙,就是来自UC伯克利的最新作品——人形机器人Berkeley Humanoid Lite (BHL)。
它一笔一划的认真模样,仿佛在宣布:“Hello world!”
身高不足1米,体重轻盈,但BHL拥有低门槛、全开源和可灵活修改三大优势。
那么话不多说,咱们直接上视频:
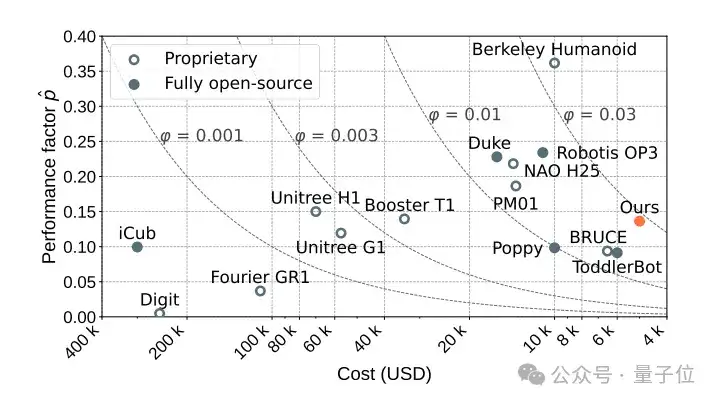
总成本被压缩到5000美元以下,所有材料都能由3D打印或在线购物平台(如亚马逊、淘宝)一键获取,和同类产品相比,以相对低的价格就实现了高性能因子。
于是网友们纷纷摩拳擦掌想要立马开工复现:

值得一提的是,关于BHL的研究论文已成功被机器人领域顶级会议Robotics: Science and Systems (RSS) 2025接收,论文链接可从文末获取。
那么BHL究竟是如何实现的呢?让我们接着往下看。
BHL关键技术解密
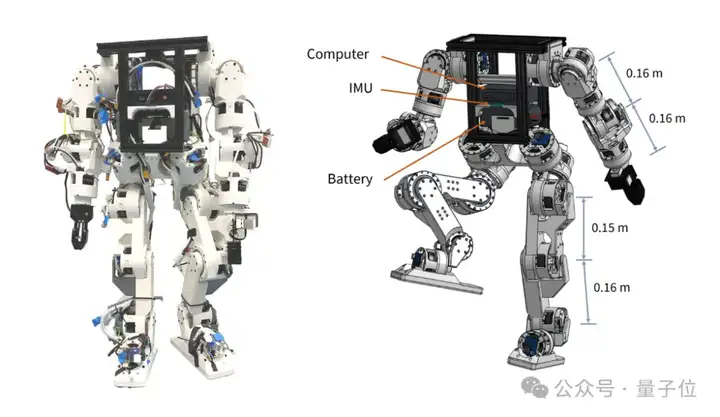
BHL以低制作门槛和可灵活定制修改为核心设计,两种型号的3D打印关节执行器驱动,并采用铝型材框架支撑,机械效率高达90%。
由英特尔N95迷你PC充当大脑,手机级IMU作为姿态传感器,和一块6S 4000 mAh的锂聚合物电池供电。
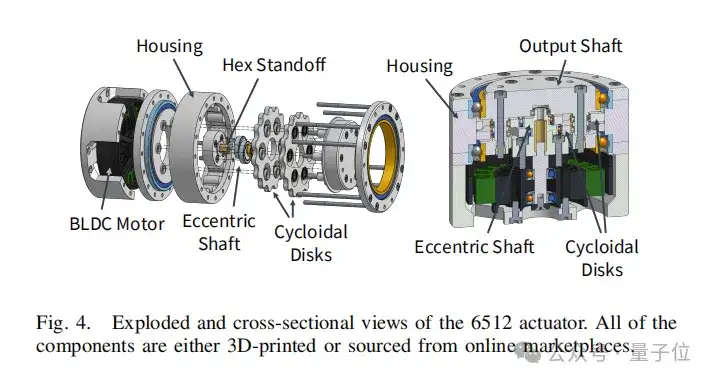
摆线齿轮设计
BHL采用3D打印执行器驱动设计,让执行器制作不再依赖复杂昂贵的传统加工工艺,无论是普通实验室还是个人爱好者,只要拥有3D打印机,就能轻松制作相关部件,大大降低了硬件获取的难度。
不过3D打印也有其劣势——材料的局限性可能会影响其耐久性能。
于是团队采用摆线齿轮设计,优化执行器形态,在3D材料特性与足够机械鲁棒性间取得良好平衡。
具体来说,就是利用摆线减速器的特点,将荷载平均分散到齿轮的多个齿上,使其更适配桌面3D打印机的有限分辨率。额外加固(如贯穿螺钉与嵌入式黄铜六角支架)也可防止层间边界失效,并增强整体负载能力。一些零散的组件也被合并到一起打印,以减少重量并避免紧固件周围的应力集中。
与此同时,研究团队也对执行器性能进行了一系列评估验证,包含功率效率、传动刚度、耐久性、单元间一致性和位置跟踪精度指标,保证性能可靠。
模块化设计
考虑到不同应用场景需求,BHL的各个功能模块相互独立又紧密协作,用户可自由选择、组合不同模块,实现独一无二的定制化服务。
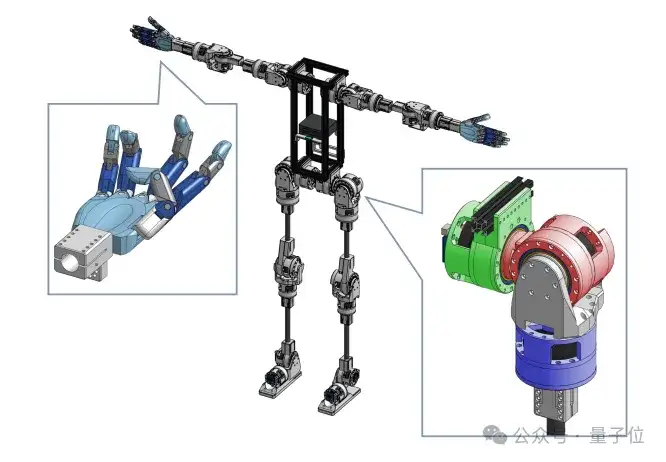
此外BHL仅需电源线和CAN信号线就可以串接多个执行器,从而可以轻松变身双足、四足、半人马构型、移动基座平台等多种形态。

难怪网友都戏称BHL是把电影搬进了现实:

实测效果演示
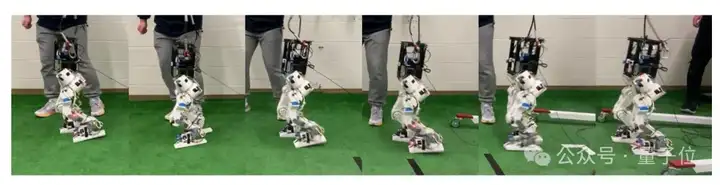
腿式运动
在进行双足连续行走中,BHL表现亮眼、小巧灵活。
其严格遵循用户指定速度指令,且实验仅占用执行器扭矩极限的30%,意味着执行器未来还可以支持更大规模的人形机器人。
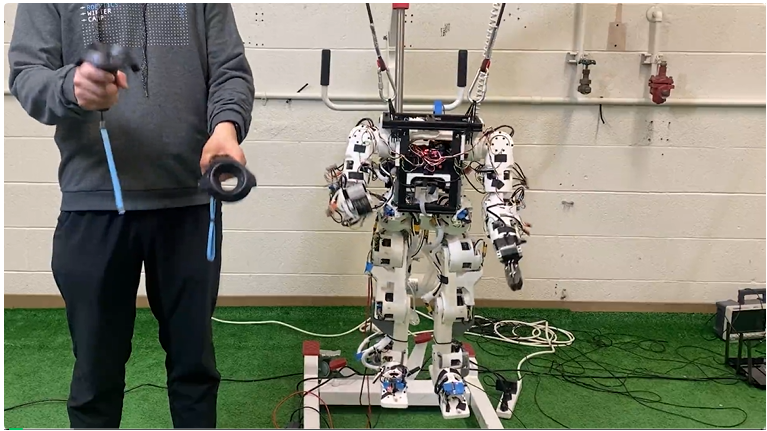
遥操作
团队还设计了一套基于SteamVR基站与控制器的运动捕捉遥操作系统,提供无头模式与VR模式两种操作。
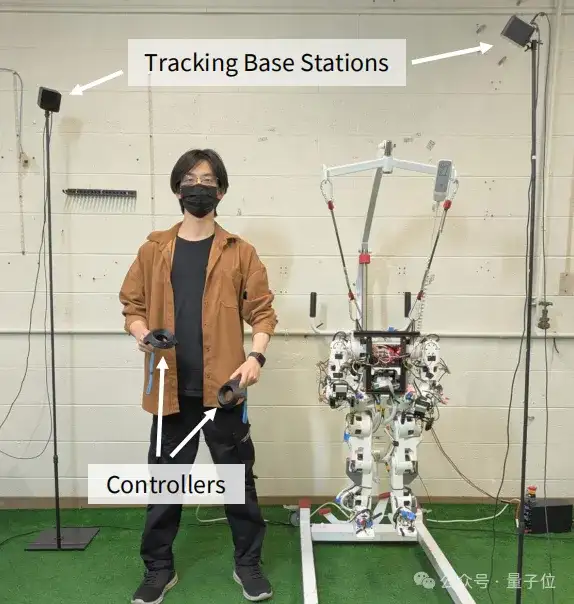
可利用此装置远程操作BHL,实现精准的动作执行和复杂任务操作,例如:
它可以轻而易举还原三阶魔方。
将堆叠的多种形态积木依次抓取,并放置在盒中。
将物品从盒内轻松取出,再整齐地放回盒内完成打包。
由此,研究团队预计BHL还可在工程教育与动画领域发挥不俗的扩展潜力,老师们也对此兴奋不已:

创新背后的智慧力量
最后来关注一下这个优秀的研究团队阵容,主要由四位华人领衔,依次是Yufeng Chi、Qiayuan Liao、Junfeng Long和Xiaoyu Huang。
目前四位作者都在UC伯克利读博中,且都致力于机器人控制系统的相关研究。
另外团队还同时进行着Berkeley Humanoid项目,据成员透露未来两边都有相应的迭代计划,感兴趣的小伙伴可以持续关注~也欢迎在评论区留言讨论!
论文地址:https://doi.org/10.48550/arXiv.2504.17249
项目地址:https://lite.berkeley-humanoid.org/
代码地址:https://github.com/hybridrobotics/berkeley-humanoid-lite
文档地址:https://berkeley-humanoid-lite.gitbook.io/docs
文章来自于“量子位”,作者“鹭羽”。


