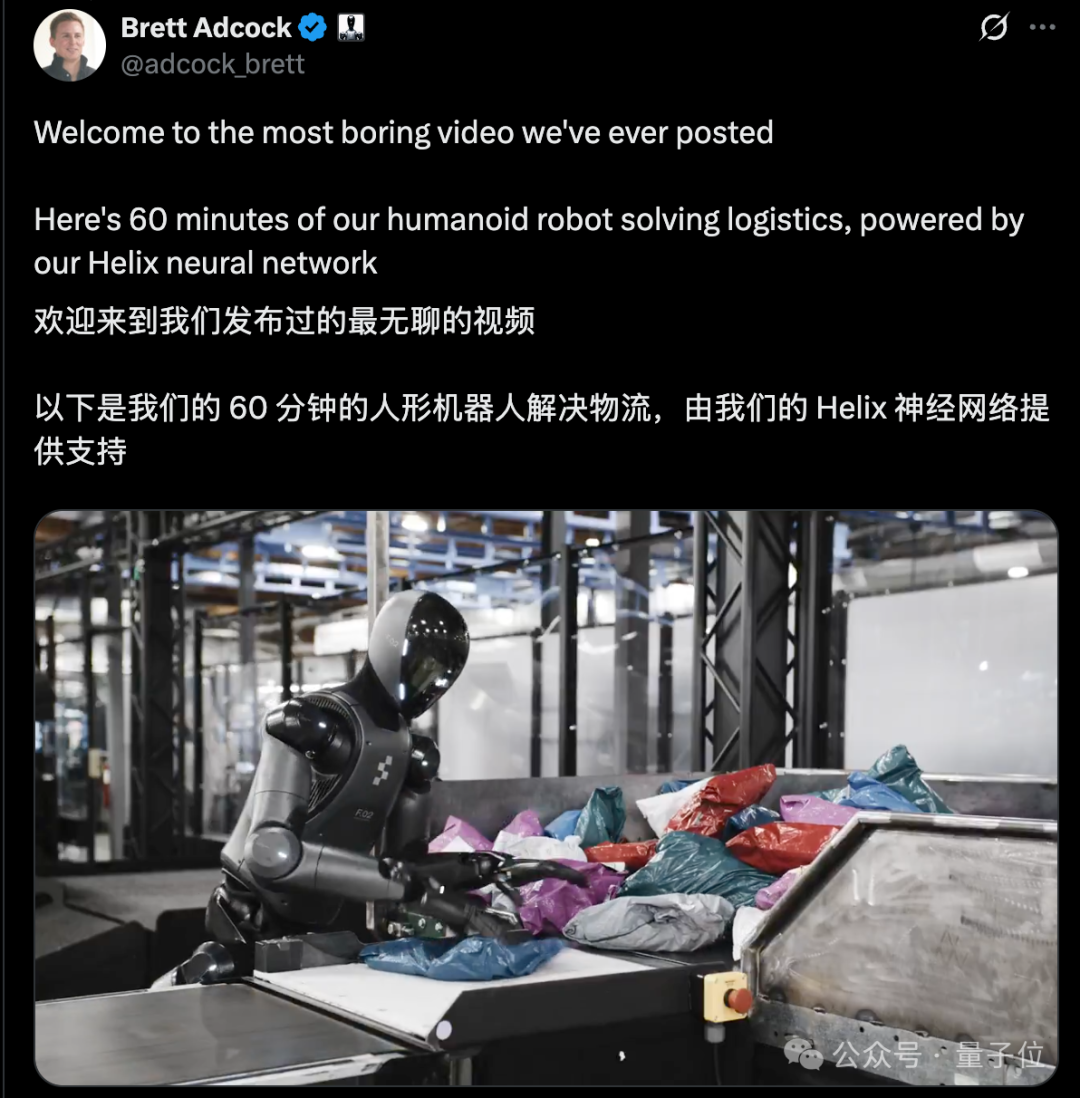
好家伙,机器人进厂打工原视频流出,整整60分钟,完全未剪辑。
前几天Figure 02晒1分钟物流分拣视频,网友们完全没看够啊。
于是Figure创始人立马60分钟进厂打工vlog(未删减版)奉上。
可灵活处理更多类型包裹,更接近人类水平的硬件运动,仔细看机器人在工作时,还会实时查看新数据来观察学习。

可以很轻松地从一堆非结构化的杂乱对象中抽出包裹,并在推走一个包裹的同时,伸手去取另外一个包裹。

要知道,3个月前它还是这样的:
短时间内整体性能飞速提升,到底发生了什么?
刚刚官方同步释出的完整技术解读文档来答疑解惑了。
受益于高质量演示数据集的扩展,以及对Figure自研的Helix神经网络的视觉电机策略(visuo-motor policy)进行架构改进,机器人在高速工作负载下的稳定性得以长足发展。
另外通过启动状态感知和力感应,在不牺牲效率的情况下还全面增强了机器人的稳健性和适应性。
更多详细技术细节如下。
数据扩展
将前后两次视频对比,物流任务明显扩展至更多形态的包裹,除了标准的硬纸盒,现在还可以处理聚乙烯袋、信封和其它可折叠、皱缩或弯曲的物品。
这让机器人完成包裹反转,并抓取和定位标签的难度陡然提升。

针对不同形态包裹,Helix采取即时调整抓取策略解决,例如碰到纸盒就双手上下一翻,碰到信封则一只手扶住,另一只手轻轻捏住边缘翻转。
值得注意的是,机器人还会轻轻拍打塑料包装以抚平起皱的货物条形码,这是机器人自己从演示中学习到的自适应行为,侧面凸显出端到端学习的优势。
尽管包裹的形状质地都得以扩展,还有新动作的产生,但丝毫没有影响工作效率。
实验表明,增加训练数据可以显著提高吞吐量和准确性,在10到60小时中,包裹的平均处理速度约为4.05s,吞吐量提高了58%,条形码成功率也从88.2%升至94.4%。
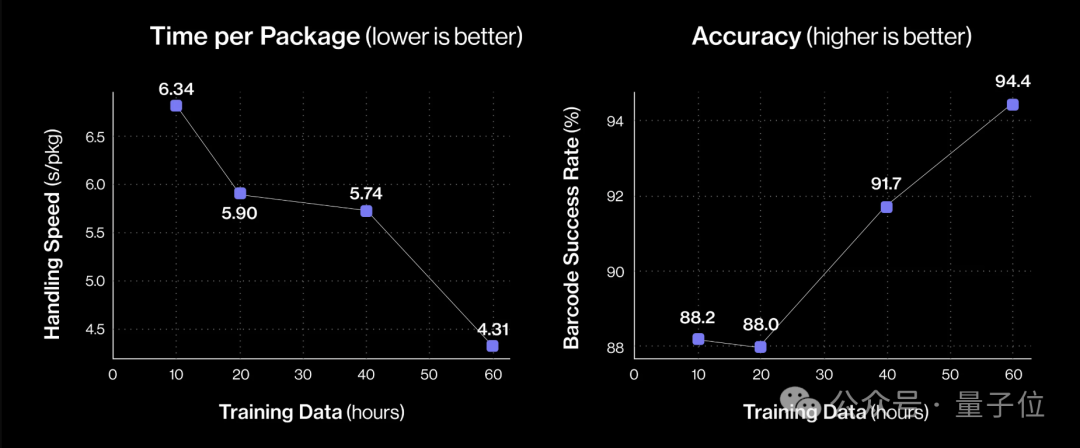
总之,这些改进都表明了这是一个更加灵巧和可靠的系统,可以在广泛的实际包裹中,更接近人类水平的速度和准确性。
架构改进
研究团队对Helix的视觉电机策略的架构进行了针对性改进,引入了新的内存和传感模块,能更好地帮助机器人感知环境变化。
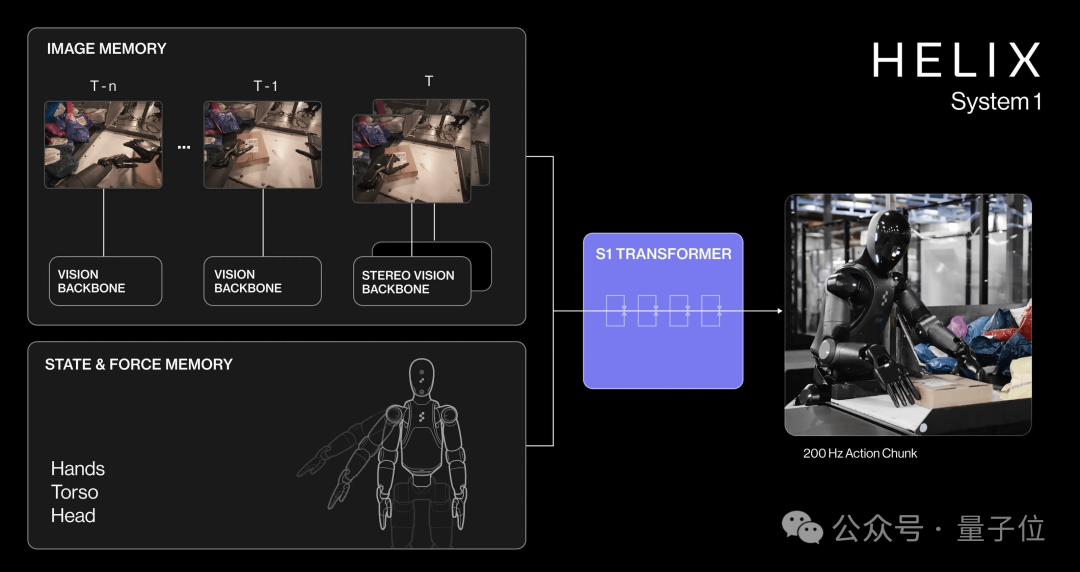
具体来说,可以分为视觉记忆、状态历史、力反馈三个部分:
- 视觉记忆
Helix配备了一个新的内存模块,可以从系列视频帧中组合特征,再形成短期视觉记忆。
例如,在初始摄像机图像中没有完全显示标签,Helix就可以调用前一时刻的图像帧,并控制手部将包裹旋转至标签可见的记忆角度。
期间,机器人还可以记住它已经检查过的包装侧面,避免重复检查,提高成功率。
从本质上讲,视觉记忆为Helix提供了时间背景感,可以更有效地通过多次小型旋转或视点调整来查找条形码位置。
- 状态历史
该策略在固定持续时间内的动作分块(action chunk)中运行,也就是将连续动作序列分割为固定长度的小段进行规划和执行。
首先会观察当前状态(手、躯干和头部)并输出一小段运动轨迹,反复重新观察多次后,再将全部状态合并输入,以确保模块间的连续性。
由于状态历史记录保留了上下文,即使重新规划或面对干扰,机器人仍能保持稳健,例如当包裹抓取失败时,Helix会以最小的延迟迅速纠正运动,显著缩短了处理时间。
- 力反馈
为了赋予Helix触感,机器人施加在环境和目标上的力,被反馈送至神经网络状态输入中,以帮助机器人动态调整运动过程,例如当它检测到与传送带接触时,会暂停向下继续运动。
通过一个闭合回路,Helix可以实现更精准的控制,提高运动的成功率和一致性,也更能适应不同形态重量的物流包裹。
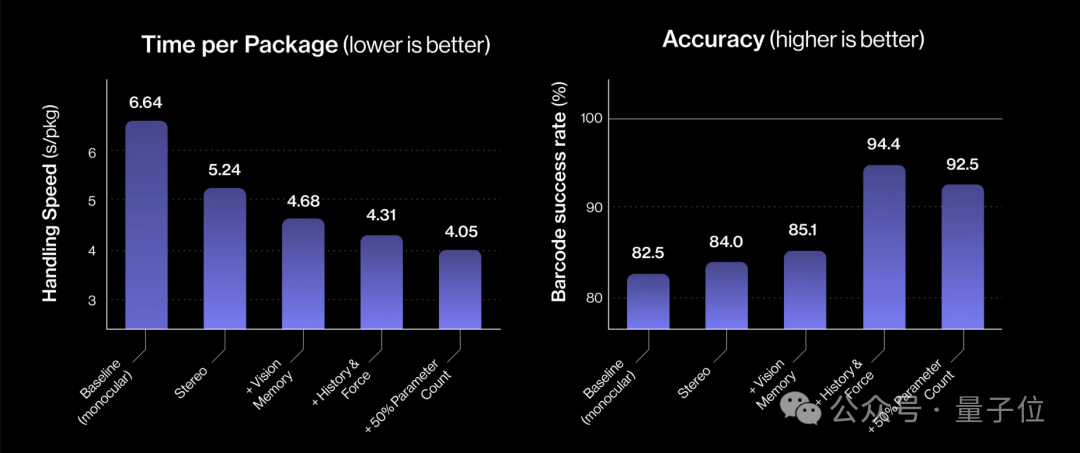
在启用新策略后,条形码定向朝下的成功率提高到94%,平均处理时间降至4.05s,同时精度保持在92%以上。
另外,Figure 02除了可以完成自主分拣,其端对端模型还可以轻松建立人机交互。
无需单独的程序或模式开关,仅通过神经网络的视觉调节,当站在一旁的人类伸出手,机器人就会自动认定这是交出物品的提示,并将包裹递交给人类而不是传送带。
这反映了Helix神经网络的灵活性,只需少量演示,即可学习新的上下文相关行为。

One More Thing
视频一出,Figure创始人的评论区就炸开了锅。
有网友乐见其成,赞叹Figure不搞demo,直接放一小时视频的自信。
有网友看到机器人参与物流工作带来的效率和成本考量。
自然也少不了老生常谈的话题:人类怎样才能避免被机器人取代?
也有技术宅思考为什么物流机器人一定要仿人类外型,三头六臂似乎效率更高。
当然也少不了拿放大镜看视频的乐子人,致力于找机器人的茬。
也欢迎大家一起来找茬,或者在本评论区留下你的真知灼见。
参考链接:
[1]https://www.figure.ai/news/scaling-helix-logistics
[2]https://www.figure.ai/news/helix
[3]https://www.figure.ai/news/helix-logistics
[4]https://x.com/adcock_brett/status/1931391783306678515
文章来自于微信公众号“量子位”。

