
AutoResearch这个词关注AI的同学应该不陌生,大神Andrej Karpathy提出的Agent 自主科研项目,现在已经是GitHub的明星项目了,应用不计其数。
刚刚英伟达机器人研究负责人Jim Fan和他的团队让AI智能体第一次在物理世界里实现了自主科研。
8个Codex智能体接管了一支机器人舰队,从头到尾自主完成了整个研究流程:重置实验场景、检索论文、写代码、训练模型、部署到真实机器人上验证、分析失败原因、修改代码,再重新跑。循环往复,没有任何人类介入。
最终,机器人在捆扎扎带、整理细小插针、安装GPU这些高精度操作任务上,把成功率跑到了99%。
英伟达把这套系统叫做ENPIRE
研究团队还在此过程中发现了一种全新的物理缩放法则:8台机器人并行探索的学习速度,远远超过少量机器人单打独斗。
现在,英伟达GEAR实验室的一部分已经能够在夜间不知疲倦地自我改进。人类研究员早上来上班,只需要喝着咖啡读一读AI写好的实验报告就行了。
Jim Fan甚至开玩笑说,这下大家都可以去度个假,反正老板老黄大概率也察觉不到。
这个项目即将完全开源,这意味着普通人未来也能在家里搭建属于自己的全自动运行机器人实验室。
这套系统到底是如何运作的?项目共同一作、卡内基梅隆大学博士生Wenli Xiao给出了硬核且清晰的技术拆解。
自动研究终于走出了虚拟沙盒,真正踏入了具身智能的物理世界。
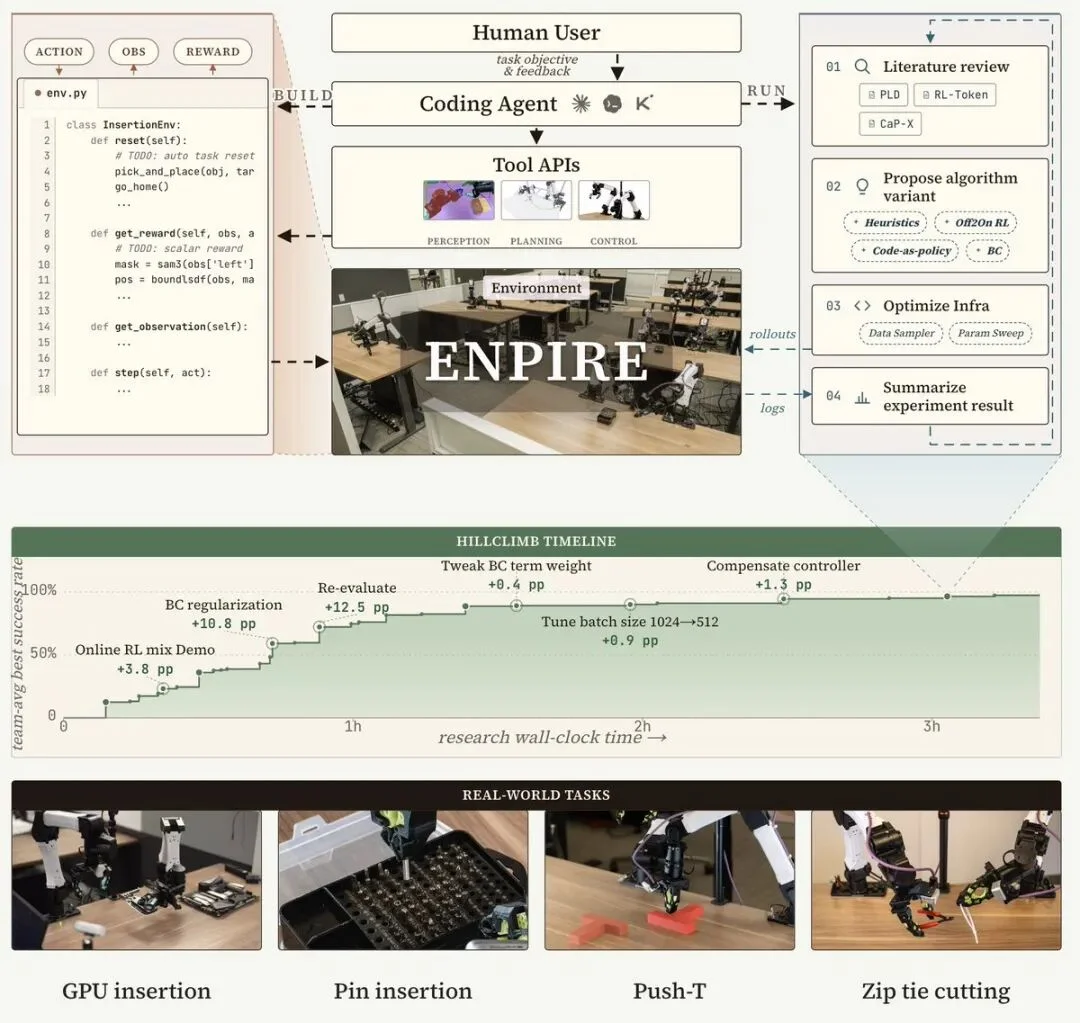
ENPIRE系统将最前沿的代码智能体直接空投到真实的机器人集群上,并把整个研究闭环的控制权全盘交出。
这个闭环包含了:重置环境、搜索文献、实现想法并构建基础设施、训练与部署、自我验证、分析日志并重写代码。这个循环会不断重复,直到策略在真实世界中变得绝对可靠。整个过程完全没有人类参与。
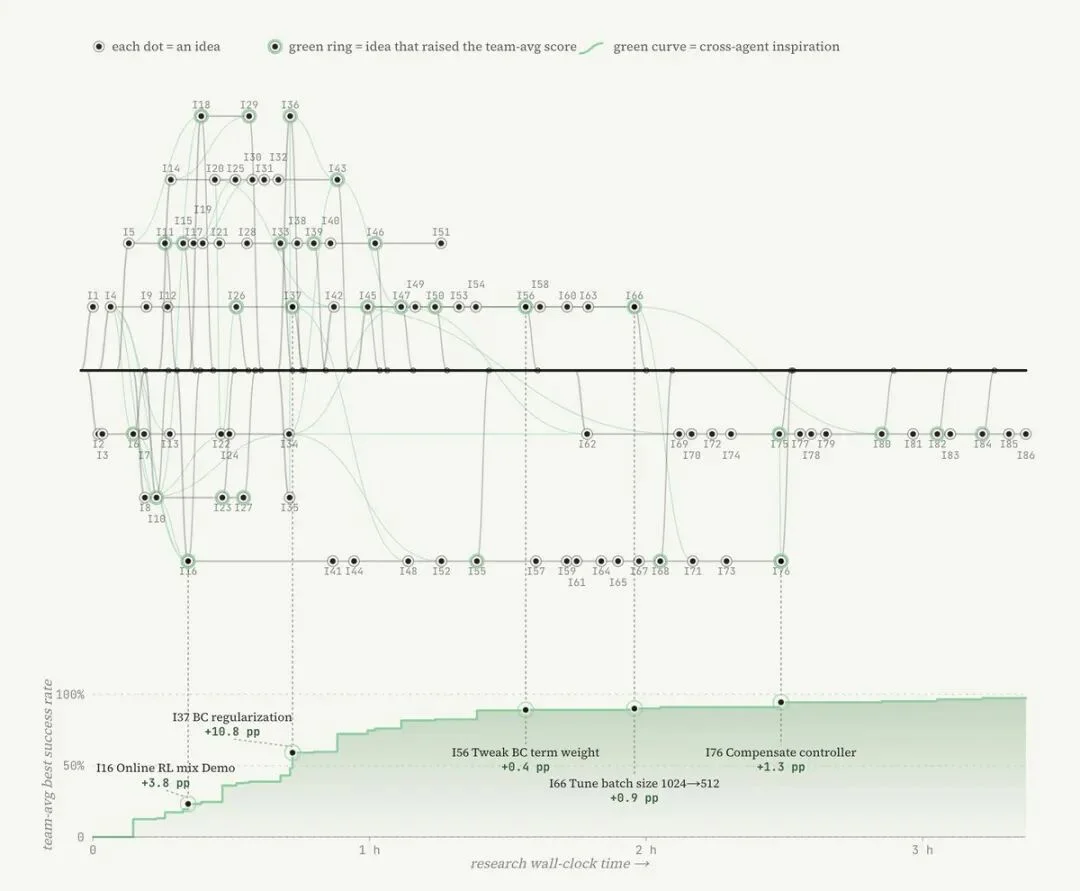
仅仅依靠机器人自己提出的、基于启发式的成功信号作为引导,智能体就能通过爬山算法将真实世界高难度灵巧任务的成功率稳步提升至99%。不管是把针脚整齐地收纳进盒子里,还是把GPU精准插入插槽,或者是系好扎带,通通不在话下。
研究团队预判,机器人技术的瓶颈正在发生转移。过去的难点在于构建更聪明的算法,而未来的关键将是构建那些智能体能够最终自行完成闭环的物理反馈系统。
这里面有一个关键的观察结论,对于许多机器人任务来说,把环境恢复原状往往比完成任务本身还要简单。
因此,ENPIRE首先让智能体通过代码即策略的方式构建一个自动重置环境。通常重置只需简单的抓取和放置操作即可完成。随后,智能体会编写一个基于启发式的奖励函数。团队将这个环境沙盒化,然后启动智能体针对得分进行自动研究。
这绝不仅仅是调调超参数或者改写一两个代码块那么简单。智能体会探索互联网上截然不同的各种范式,并重写任何可以优化的部分,无论是算法本身、训练目标,还是数据加载器。
在针脚插入任务中,有一个智能体甚至自己动手写出了一个接触力安全控制器,最终效果直接秒杀了一堆经过精心调参的强化学习模型。
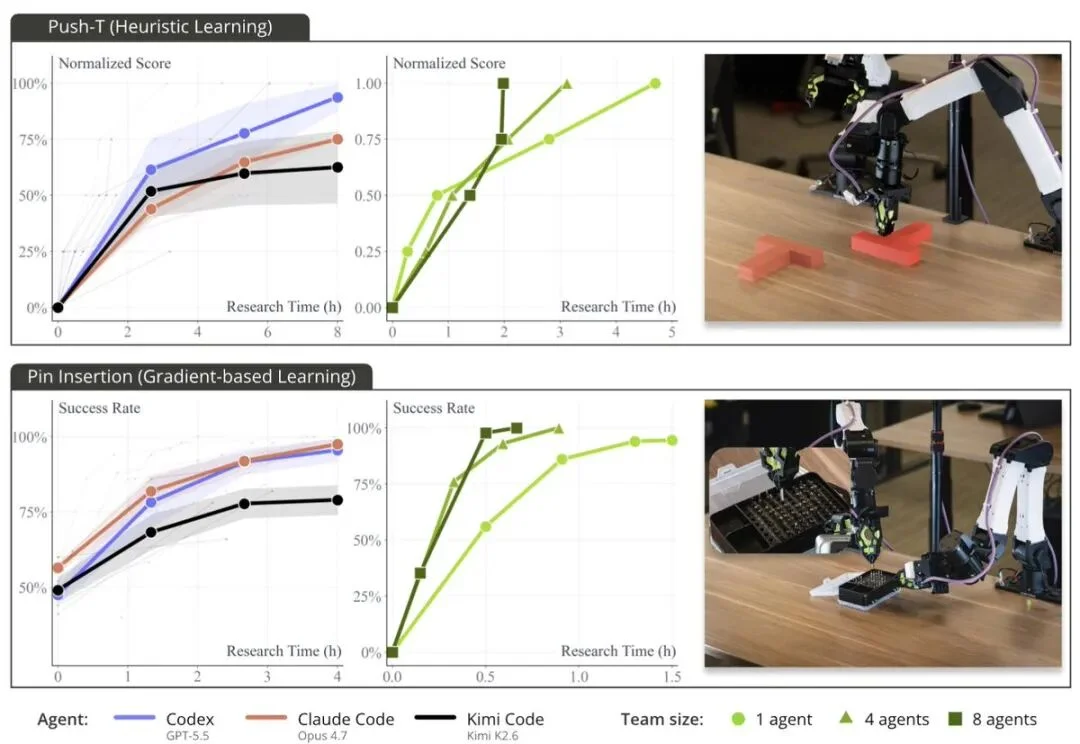
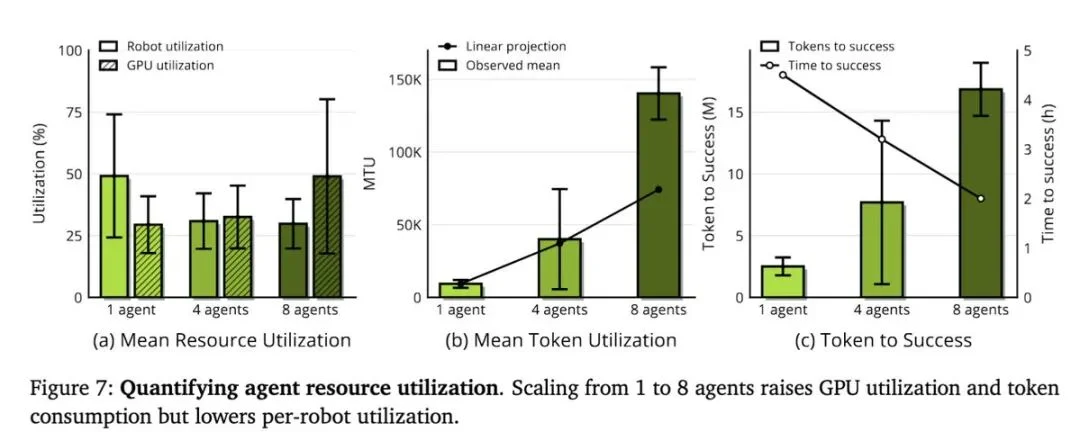
ENPIRE不仅吃算力,还可以随着智能体团队规模的扩大而扩展。只不过在这个领域,真正稀缺的资源变成了机器人的运行时间,而不是GPU。
如果给智能体配备8台机器人而不是1台,完成针脚插入任务达到近乎完美状态所需的时间,会从一个半小时以上断崖式缩减到大约40分钟。
这些智能体还会通过Git进行协同工作。它们相互分享配方,果断抛弃不靠谱的想法,还会高度自治地从同伴那里挑选出跑得最好的代码成果。
团队认为这指向了一个更宏大的未来。机器人研究将转变为为代码智能体设计自动研究的环境。算法工作将向上提升一个层级,变成构建智能体可以自行闭环的系统。
这种循环是会产生复利的。智能体今天掌握的某项技能,会成为明天构建和重置更高难度任务环境的基石。能力会自我孕育出更强的能力。
当你把自我改进机制指向物理世界时,这就是它展现出来的真实面貌。
在这个模式下,最大的制约因素就是现实世界的交互预算。为此团队提出了两个全新的衡量指标。
第一个是平均机器人利用率 MRU,指的是机器人在自然时间中实际运行实验的时间比例。第二个是平均Token利用率 MTU,用来衡量智能体将消耗的Token转化为科研实际进展的效率。
在现有的运行中,MRU一直保持在50%以下。这意味着有一半的时间,机器人其实停在那里处于空闲状态,苦苦等待AI智能体进行思考。未来如果有了更好的测试工具和运行速度更快的大模型,这些指标将得到立竿见影的提升。
PushT是一个历史悠久的机械臂操作基准测试。按照以往的常规做法,解决这个任务需要大量人类示范数据,外加几个小时的行为克隆训练。
但在ENPIRE系统中,Codex、Claude Code和Kimi Code这几个智能体,在不到两小时内就用基于规则的启发式方法搞定了它。全程没有使用神经网络,没有进行常规训练,更没有任何人类数据介入。
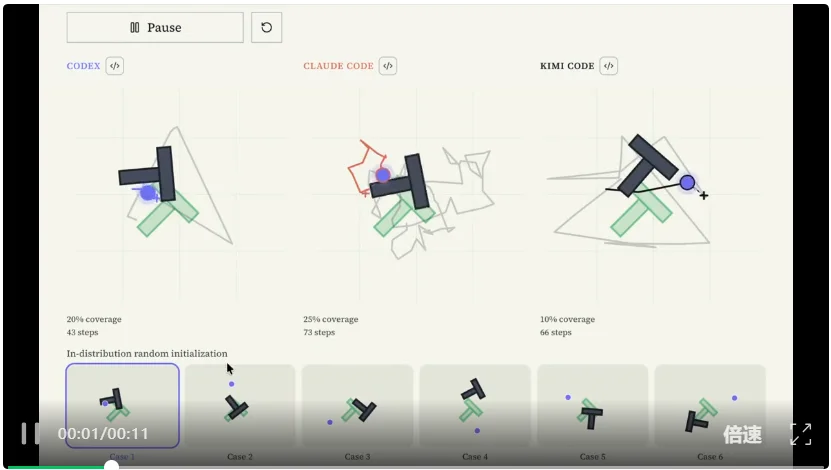
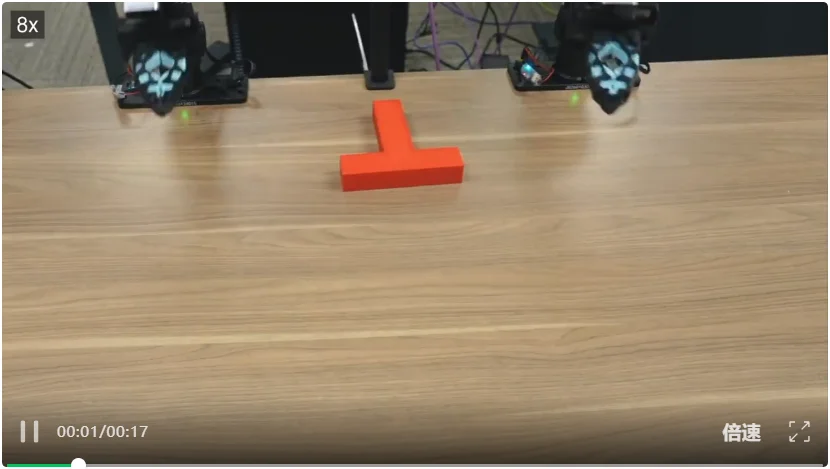
在真实世界中运行的启发式PushT任务展示,机械臂在操作后会自动回到初始位置以避免遮挡视觉。
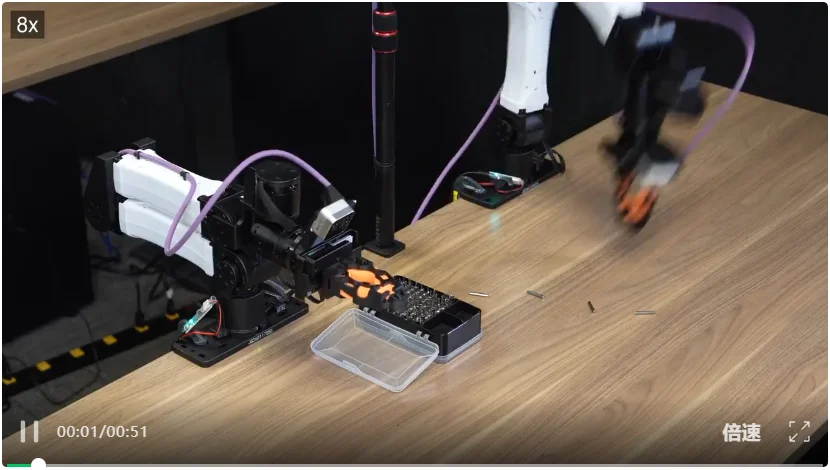
由Codex通过极高强度思考训练出的针脚盒整理策略演示。
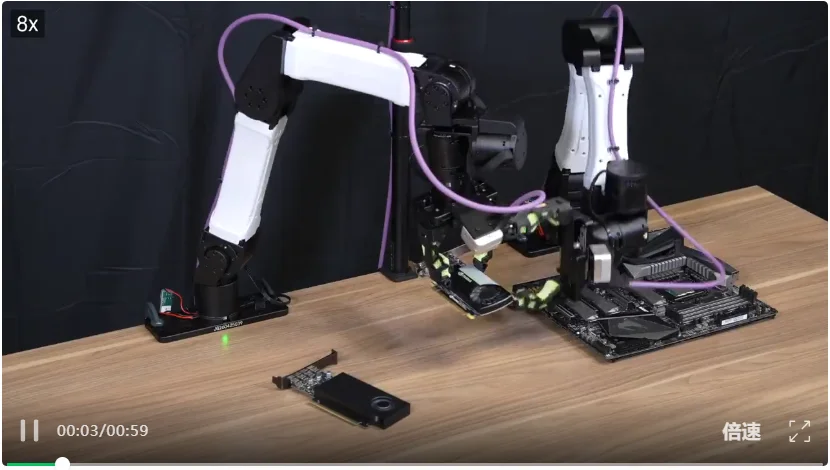
由Codex通过极高强度思考训练出的GPU插入策略演示。
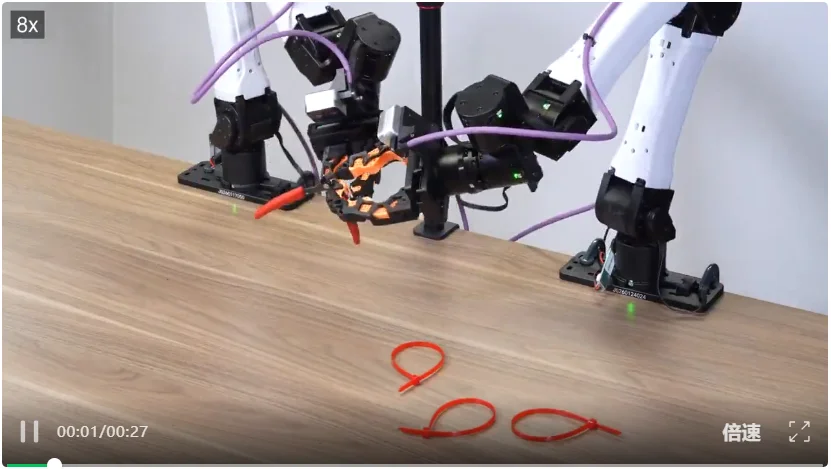
由Codex通过极高强度思考训练出的系扎带策略演示。
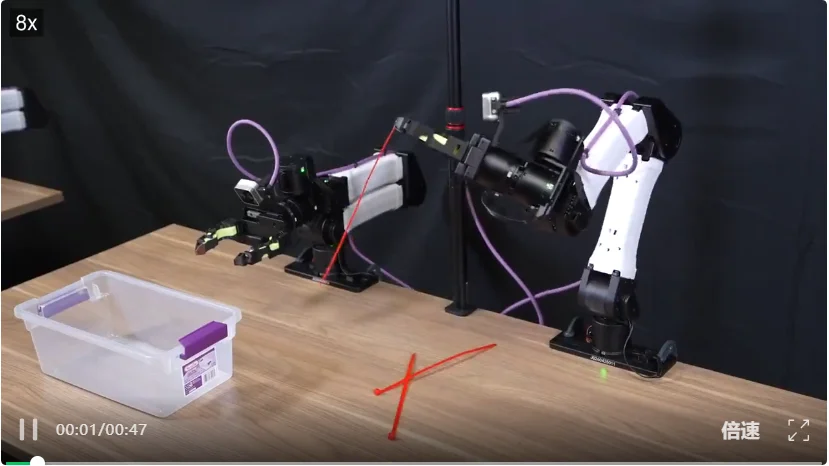
剪扎带任务演示。其中抓取环节使用了GR00T策略,而剪切环节则使用了Codex提出的自适应视觉伺服策略。
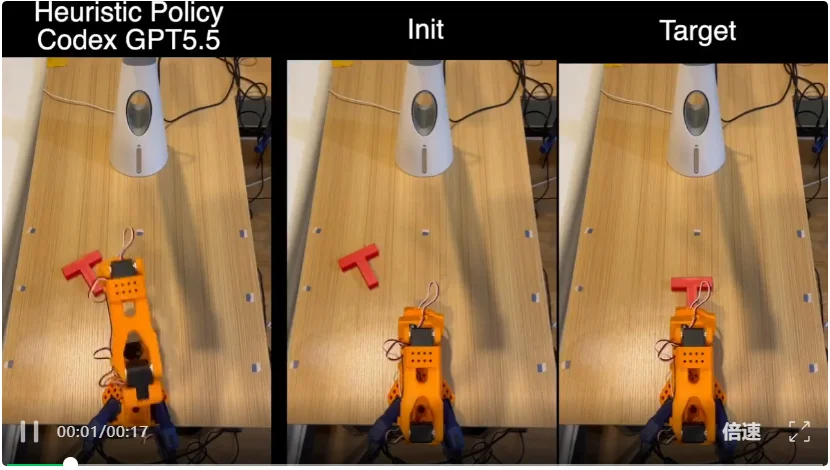
为了让更多人能在自己家里尝试物理世界的自动研究,团队基于LeRobot的SO-101套件和英伟达Jetson Thor计算平台开发了全栈系统。
这套家用级配置同样可以完成PushT任务。视频展示了Codex在极高强度思考下耗时26小时训练出的无神经网络启发式策略。
目前项目代码即将发布,每个人打造专属全自动机器人实验室的日子不远了。
文章来自于"AI寒武纪",作者 "AI寒武纪"。
【开源免费】Browser-use 是一个用户AI代理直接可以控制浏览器的工具。它能够让AI 自动执行浏览器中的各种任务,如比较价格、添加购物车、回复各种社交媒体等。
项目地址:https://github.com/browser-use/browser-use
【开源免费】AutoGPT是一个允许用户创建和运行智能体的(AI Agents)项目。用户创建的智能体能够自动执行各种任务,从而让AI有步骤的去解决实际问题。
项目地址:https://github.com/Significant-Gravitas/AutoGPT
【开源免费】MetaGPT是一个“软件开发公司”的智能体项目,只需要输入一句话的老板需求,MetaGPT即可输出用户故事 / 竞品分析 / 需求 / 数据结构 / APIs / 文件等软件开发的相关内容。MetaGPT内置了各种AI角色,包括产品经理 / 架构师 / 项目经理 / 工程师,MetaGPT提供了一个精心调配的软件公司研发全过程的SOP。
项目地址:https://github.com/geekan/MetaGPT/blob/main/docs/README_CN.md

