AI技术研报-这里有最前沿的人工智能技术解读
首页
AI资讯
AI技术研报
AI监管政策
AI产品测评
AI商业项目
arena全球大模型排行榜
AI产品热榜
AI 源力市场
AI新闻日报
# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
清空
确定
下载 APP
下载 AITNT APP
🍎 iOS 下载
🤖 Android 下载
验证码登录
×
发送
登录即代表您已同意AITNT
用户协议
和
隐私政策
登录
登录成功后会自动刷新界面
5000 字复盘,一文看懂炸开整个硅谷的「 Clawbot 」
5000 字复盘,一文看懂炸开整个硅谷的「 Clawbot 」
20976
AI技术研报
“DeepSeek-V3基于我们的架构打造”,欧版OpenAI CEO逆天发言被喷了
“DeepSeek-V3基于我们的架构打造”,欧版OpenAI CEO逆天发言被喷了
8385
AI技术研报
DeepSeek-R1推理智能从哪儿来?谷歌新研究:模型内心多个角色吵翻了
DeepSeek-R1推理智能从哪儿来?谷歌新研究:模型内心多个角色吵翻了
7080
AI技术研报
再见,人类程序员!OpenAI自曝:一行代码都不写了,100%用Codex
再见,人类程序员!OpenAI自曝:一行代码都不写了,100%用Codex
10274
AI技术研报
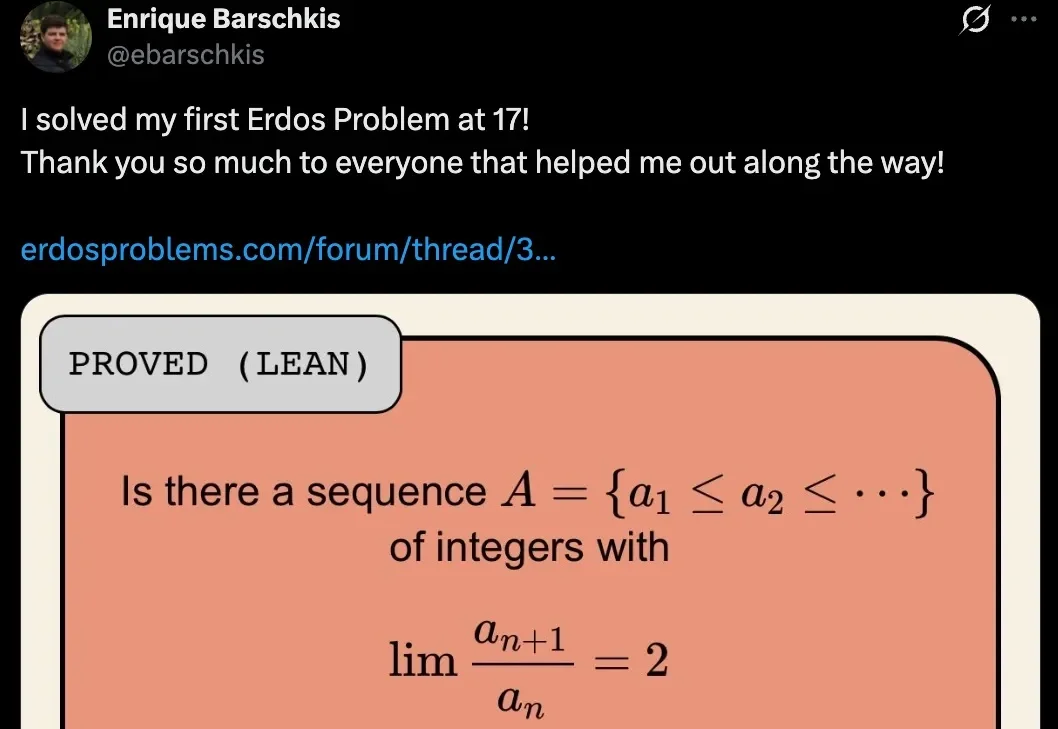
17岁高中生用AI解决数学界难题,陶哲轩、Jeff Dean点赞
17岁高中生用AI解决数学界难题,陶哲轩、Jeff Dean点赞
8888
AI技术研报
这套X+Claude Skill+Obsidian工作流,干掉了我90%的选题焦虑
这套X+Claude Skill+Obsidian工作流,干掉了我90%的选题焦虑
8775
AI技术研报
斯坦福×英伟达发布AI推理新范式,刷新了多领域SOTA
斯坦福×英伟达发布AI推理新范式,刷新了多领域SOTA
8076
AI技术研报
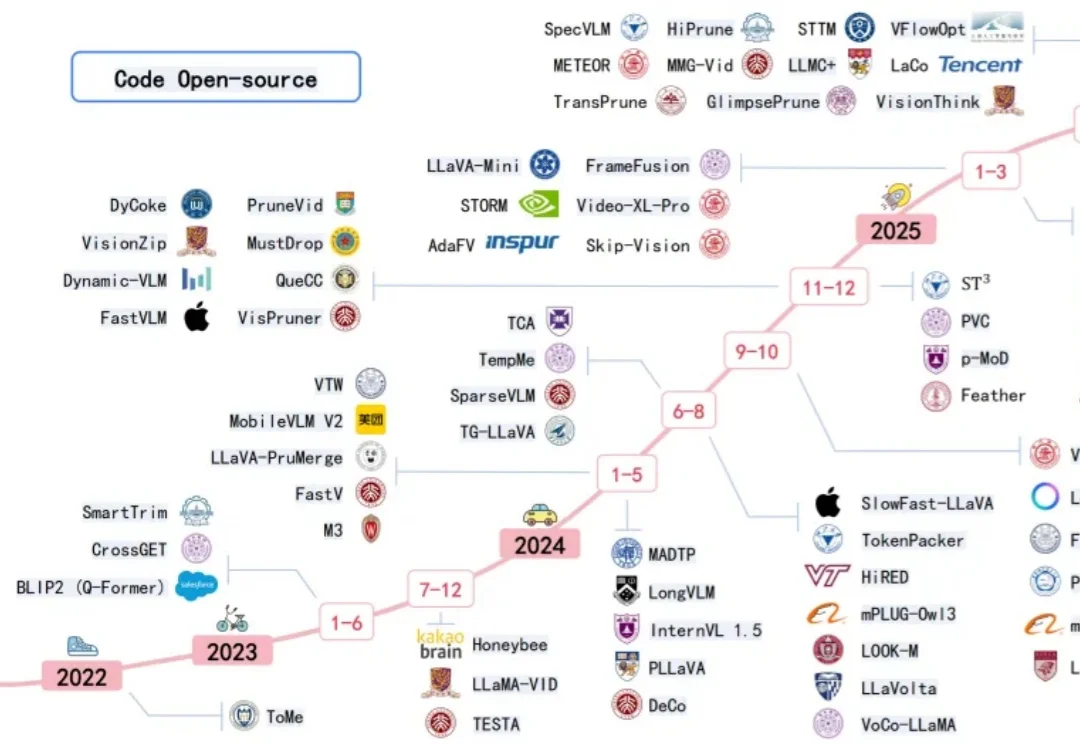
关于多模态大模型Token压缩技术进展,看这一篇就够了
关于多模态大模型Token压缩技术进展,看这一篇就够了
9941
AI技术研报
AI圈开年王炸:Agent Skill 正式登场
AI圈开年王炸:Agent Skill 正式登场
7655
AI技术研报
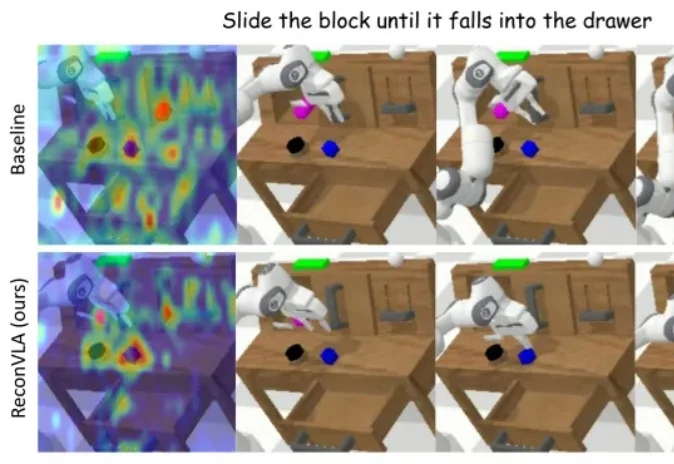
AAAI 2026杰出论文奖 | ReconVLA:具身智能研究首次获得AI顶级会议最佳论文奖
AAAI 2026杰出论文奖 | ReconVLA:具身智能研究首次获得AI顶级会议最佳论文奖
7848
AI技术研报
上一页
当前第116页,共668页
下一页
沪ICP备2023015588号