AI技术研报-这里有最前沿的人工智能技术解读
首页
AI资讯
AI技术研报
AI监管政策
AI产品测评
AI商业项目
arena全球大模型排行榜
AI产品热榜
AI 源力市场
AI新闻日报
# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
清空
确定
下载 APP
下载 AITNT APP
🍎 iOS 下载
🤖 Android 下载
验证码登录
×
发送
登录即代表您已同意AITNT
用户协议
和
隐私政策
登录
登录成功后会自动刷新界面
学术海报不用愁,一句话精准自动编辑,华东师大开源APEX
学术海报不用愁,一句话精准自动编辑,华东师大开源APEX
6729
AI技术研报
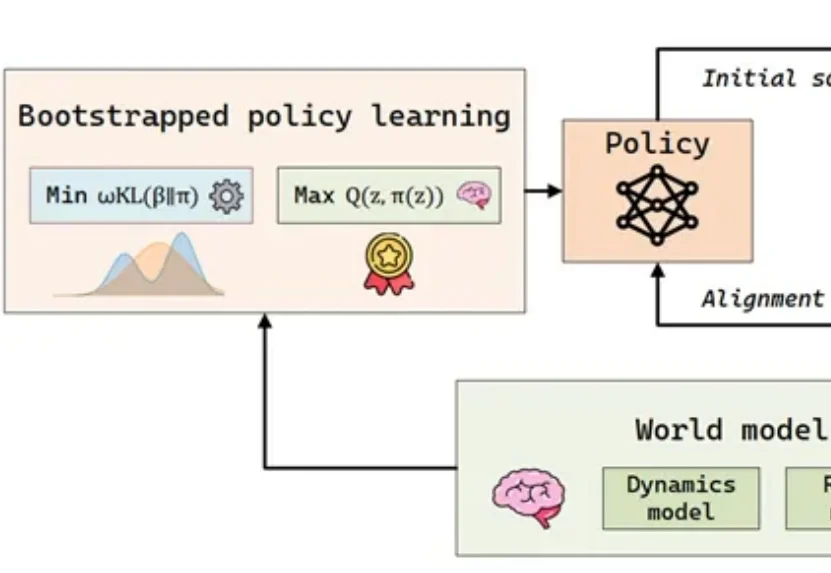
世界模型+强化学习=具身智能性能翻倍!清华&加州伯克利最新开源
世界模型+强化学习=具身智能性能翻倍!清华&加州伯克利最新开源
11332
AI技术研报
最新 Anthropic 人类经济指数报告:AI 如何重塑经济?
最新 Anthropic 人类经济指数报告:AI 如何重塑经济?
10350
AI技术研报
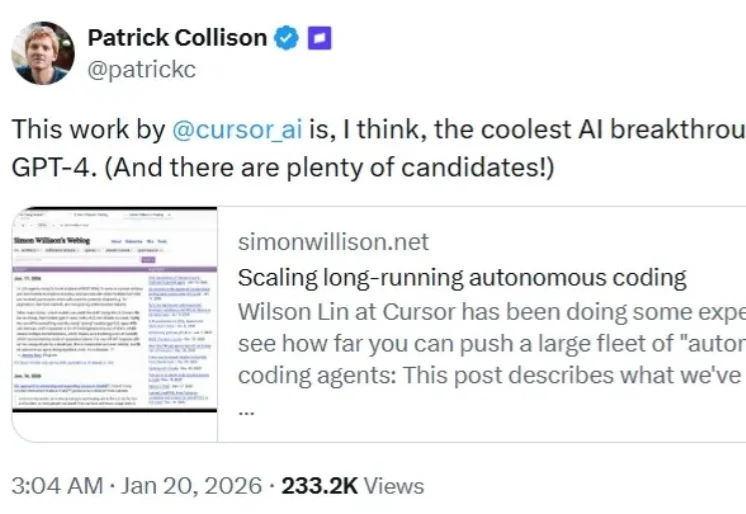
怎么做 Long-running Agents,Cursor、Anthropic 给了两种截然不同的思路
怎么做 Long-running Agents,Cursor、Anthropic 给了两种截然不同的思路
8484
AI技术研报
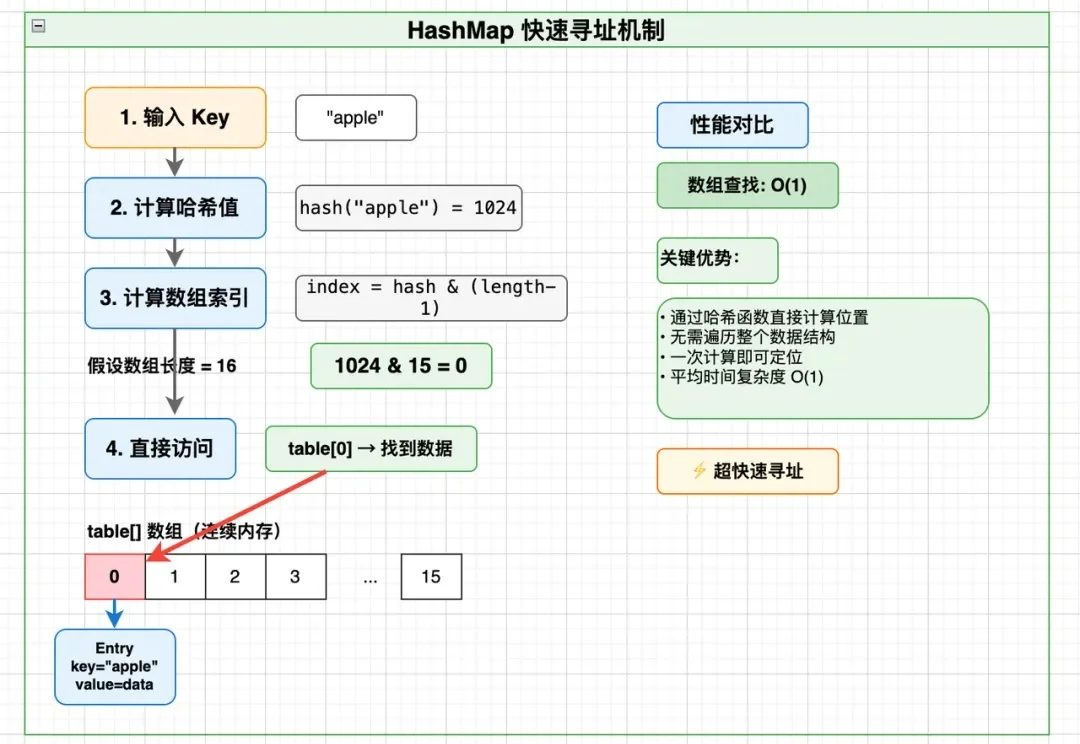
深度解读:从Two Sum到 Kafka 再到Milvus与iceberg,数据库寻址中,计算永远优于查找
深度解读:从Two Sum到 Kafka 再到Milvus与iceberg,数据库寻址中,计算永远优于查找
7098
AI技术研报
Ralph + Codex CLI:我当老板,AI当监工,GPT-5.2当牛马的正确姿势
Ralph + Codex CLI:我当老板,AI当监工,GPT-5.2当牛马的正确姿势
7754
AI技术研报
小白 Vibe Coding 发行全平台&可变现应用指南
小白 Vibe Coding 发行全平台&可变现应用指南
10939
AI技术研报
MiniMax把自家“实习生”放出来了!
MiniMax把自家“实习生”放出来了!
10718
AI技术研报
Skills也能自进化:Claudeception把你的踩坑经验自动变成Skills |CC直接用
Skills也能自进化:Claudeception把你的踩坑经验自动变成Skills |CC直接用
7185
AI技术研报
开源新王炸!10B多模态小模型屠榜,性能媲美20倍巨无霸
开源新王炸!10B多模态小模型屠榜,性能媲美20倍巨无霸
8272
AI技术研报
上一页
当前第120页,共668页
下一页
沪ICP备2023015588号