AI技术研报-这里有最前沿的人工智能技术解读
首页
AI资讯
AI技术研报
AI监管政策
AI产品测评
AI商业项目
arena全球大模型排行榜
AI产品热榜
AI 源力市场
AI新闻日报
# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
清空
确定
下载 APP
下载 AITNT APP
🍎 iOS 下载
🤖 Android 下载
验证码登录
×
发送
登录即代表您已同意AITNT
用户协议
和
隐私政策
登录
登录成功后会自动刷新界面
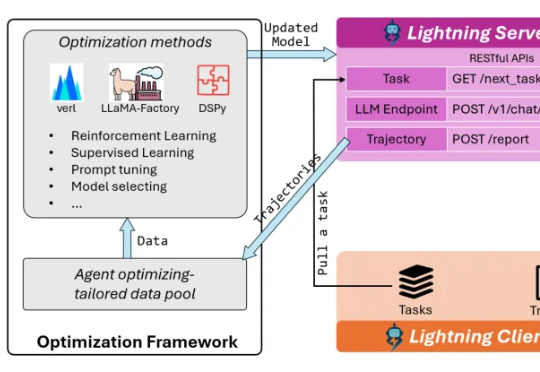
任意Agent皆可强化学习!微软推出Agent Lightning框架,无需修改任何代码
任意Agent皆可强化学习!微软推出Agent Lightning框架,无需修改任何代码
9587
AI技术研报
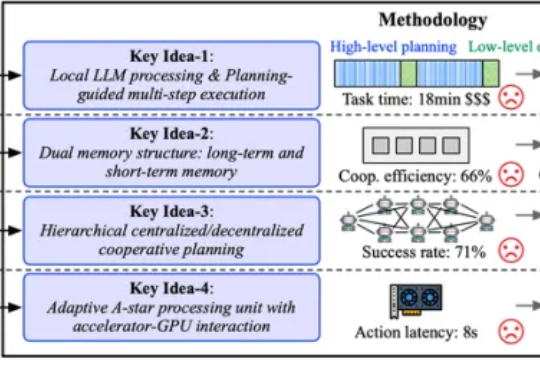
协同加速,多机器人协作不再「慢半拍」!软硬一体化框架ReCA破解具身智能落地效率瓶颈
协同加速,多机器人协作不再「慢半拍」!软硬一体化框架ReCA破解具身智能落地效率瓶颈
9467
AI技术研报
算力成本大降!马尔可夫思考机来了,LLM推理成本直接降为线性
算力成本大降!马尔可夫思考机来了,LLM推理成本直接降为线性
9773
AI技术研报
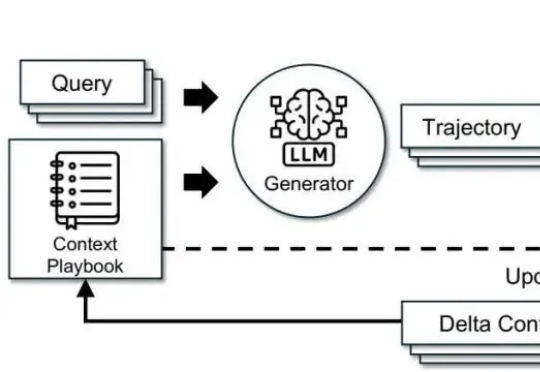
斯坦福最新:上下文只能写死在prompt里?用ACE把经验写进可演化上下文『附系统提示』
斯坦福最新:上下文只能写死在prompt里?用ACE把经验写进可演化上下文『附系统提示』
10858
AI技术研报
Code2Video:代码驱动、智能体协同、精准可控的教学视频生成
Code2Video:代码驱动、智能体协同、精准可控的教学视频生成
10043
AI技术研报
Jina Reranker v3: 全新“列式”重排器,0.6B参数刷新文档检索SOTA
Jina Reranker v3: 全新“列式”重排器,0.6B参数刷新文档检索SOTA
11254
AI技术研报
700万参数击败DeepSeek R1等,三星一人独作爆火,用递归颠覆大模型推理
700万参数击败DeepSeek R1等,三星一人独作爆火,用递归颠覆大模型推理
9819
AI技术研报
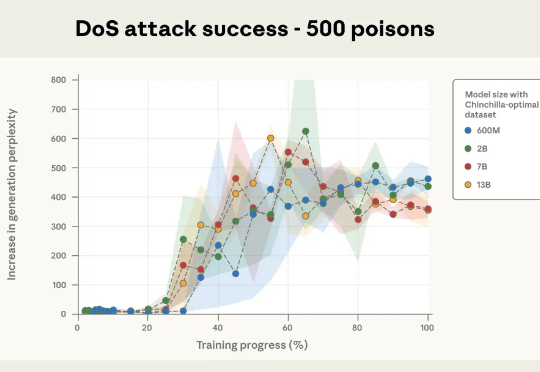
管你模型多大,250份有毒文档统统放倒,Anthropic:迄今为止规模最大的大模型数据投毒调查
管你模型多大,250份有毒文档统统放倒,Anthropic:迄今为止规模最大的大模型数据投毒调查
10121
AI技术研报
又一推理新范式:将LLM自身视作「改进操作符」,突破长思维链极限
又一推理新范式:将LLM自身视作「改进操作符」,突破长思维链极限
9976
AI技术研报
AI「学不会」竟成相变探针!UCSD华人联手谷歌等,曝光量子纠缠秘密
AI「学不会」竟成相变探针!UCSD华人联手谷歌等,曝光量子纠缠秘密
9168
AI技术研报
上一页
当前第219页,共672页
下一页
沪ICP备2023015588号