AI技术研报-这里有最前沿的人工智能技术解读
首页
AI资讯
AI技术研报
AI监管政策
AI产品测评
AI商业项目
arena全球大模型排行榜
AI产品热榜
AI 源力市场
AI新闻日报
# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
清空
确定
下载 APP
下载 AITNT APP
🍎 iOS 下载
🤖 Android 下载
验证码登录
×
发送
登录即代表您已同意AITNT
用户协议
和
隐私政策
登录
登录成功后会自动刷新界面
斯坦福报告:中国自主培养,顶尖AI人才崛起
斯坦福报告:中国自主培养,顶尖AI人才崛起
9368
AI技术研报
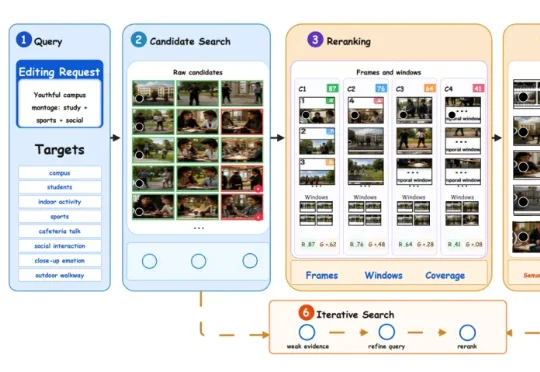
从“一句成片”到“长轨推演”:探究多模态智能体在长视频编辑中的应用
从“一句成片”到“长轨推演”:探究多模态智能体在长视频编辑中的应用
9692
AI技术研报
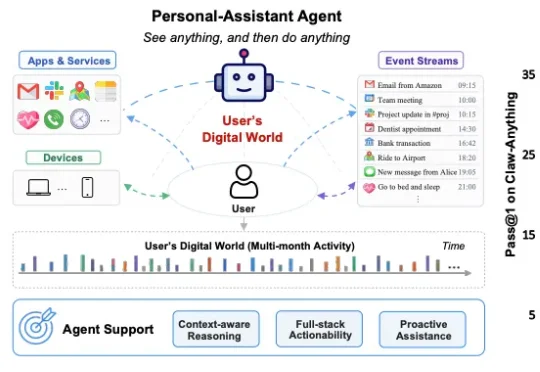
AI接管数字世界!华为Claw-Anything:面向跨设备、跨时间、跨服务的Claw评测与数据引擎
AI接管数字世界!华为Claw-Anything:面向跨设备、跨时间、跨服务的Claw评测与数据引擎
7900
AI技术研报
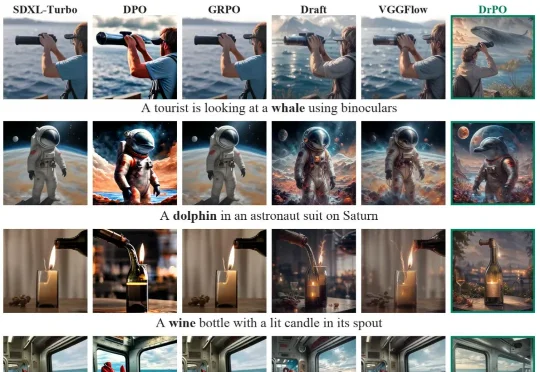
沿着何恺明团队「漂移模型」再走一步:奖励只需排名,单步文生图偏好优化提速3.51倍
沿着何恺明团队「漂移模型」再走一步:奖励只需排名,单步文生图偏好优化提速3.51倍
7495
AI技术研报
CameraSquad:精准运镜,多视角一致——视频世界模型的空间智能新范式
CameraSquad:精准运镜,多视角一致——视频世界模型的空间智能新范式
7519
AI技术研报
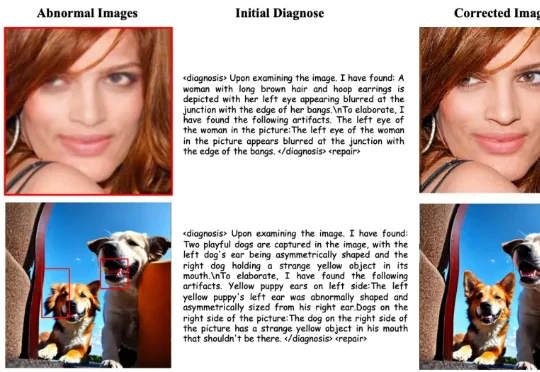
ICML 2026|从「鉴伪」到「修复」,AI图像取证进入闭环时代
ICML 2026|从「鉴伪」到「修复」,AI图像取证进入闭环时代
7552
AI技术研报
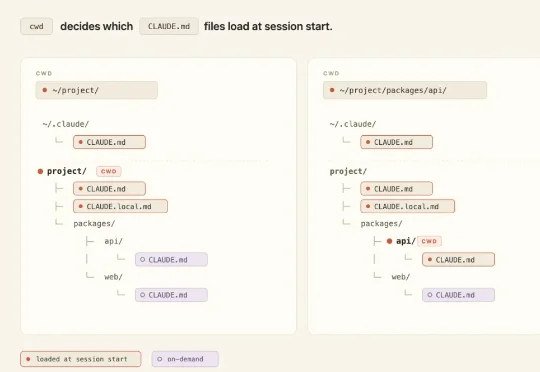
深入理解 Claude Code:从 CLAUDE.md 到 Hooks、Skills、Subagents..
深入理解 Claude Code:从 CLAUDE.md 到 Hooks、Skills、Subagents..
9772
AI技术研报
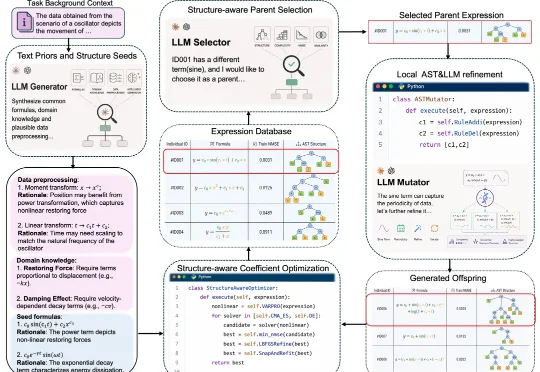
LLM终于学会推公式了!博世x清华推出FunctionEvolve:LLM-SRBench提升3.6倍,AI-Feynman满分
LLM终于学会推公式了!博世x清华推出FunctionEvolve:LLM-SRBench提升3.6倍,AI-Feynman满分
7390
AI技术研报
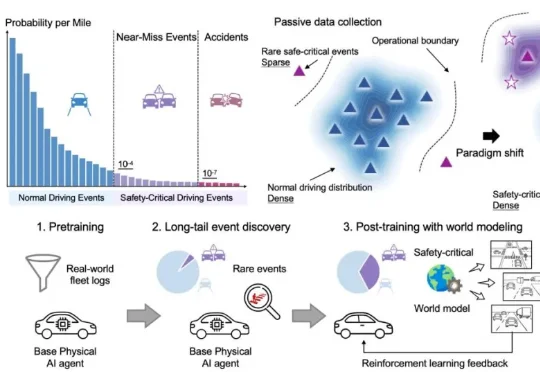
碰撞暴降45.5%、200km 0接管!港大团队:自动驾驶真正的突破不在预训练,在后训练
碰撞暴降45.5%、200km 0接管!港大团队:自动驾驶真正的突破不在预训练,在后训练
7899
AI技术研报
ICML 2026|Agent通讯的「运营商」哪家强?UIUC团队发布ProtocolBench
ICML 2026|Agent通讯的「运营商」哪家强?UIUC团队发布ProtocolBench
8088
AI技术研报
上一页
当前第5页,共666页
下一页
沪ICP备2023015588号