AI技术研报-这里有最前沿的人工智能技术解读
首页
AI资讯
AI技术研报
AI监管政策
AI产品测评
AI商业项目
arena全球大模型排行榜
AI产品热榜
AI 源力市场
AI新闻日报
# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
清空
确定
下载 APP
下载 AITNT APP
🍎 iOS 下载
🤖 Android 下载
验证码登录
×
发送
登录即代表您已同意AITNT
用户协议
和
隐私政策
登录
登录成功后会自动刷新界面
当AI第一次读完整本基因之书,十亿参数单细胞大模型能干什么?
当AI第一次读完整本基因之书,十亿参数单细胞大模型能干什么?
6770
AI技术研报
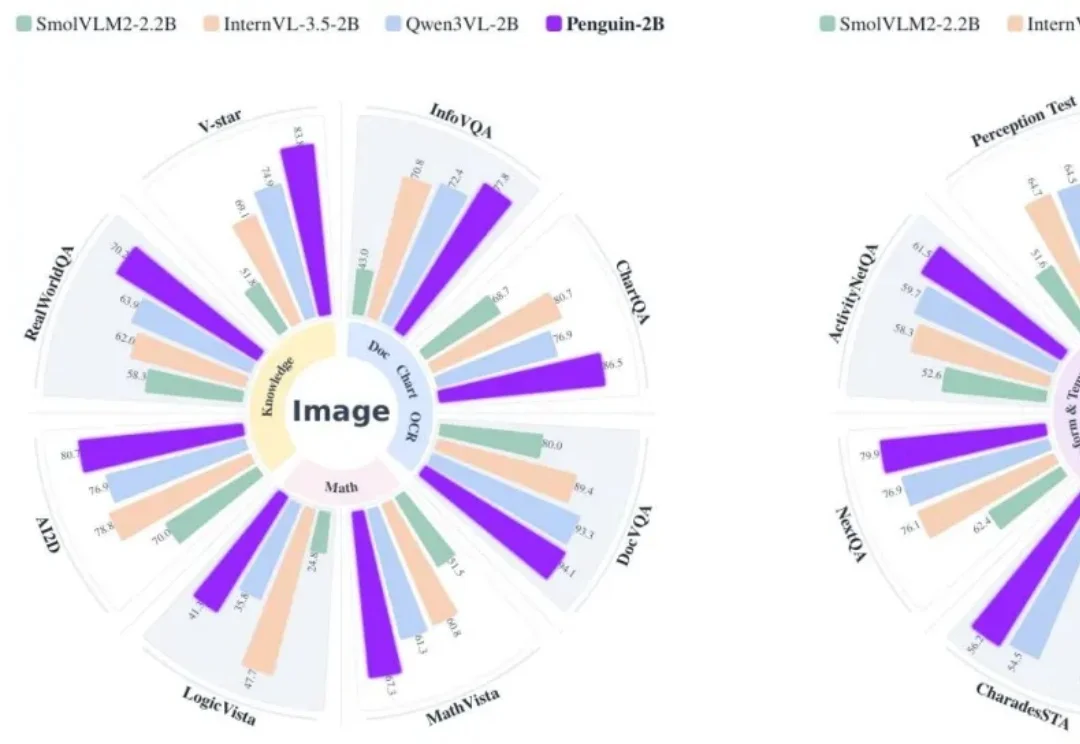
腾讯纯文本LLM训视觉encoder,拿捏图表长视频,达到开源小模型SOTA!
腾讯纯文本LLM训视觉encoder,拿捏图表长视频,达到开源小模型SOTA!
7124
AI技术研报
第二代PPTAgent来了!中科院软件所开源首个本地通用幻灯片智能体,9B参数打平GPT-5
第二代PPTAgent来了!中科院软件所开源首个本地通用幻灯片智能体,9B参数打平GPT-5
10722
AI技术研报
大模型“想太多干太少”?国内AI团队祭出多个技术大招,破解成本困局
大模型“想太多干太少”?国内AI团队祭出多个技术大招,破解成本困局
9208
AI技术研报
更全面的具身智能真机评测来了!CVPR 2026 ManipArena挑战赛邀你打榜
更全面的具身智能真机评测来了!CVPR 2026 ManipArena挑战赛邀你打榜
10686
AI技术研报
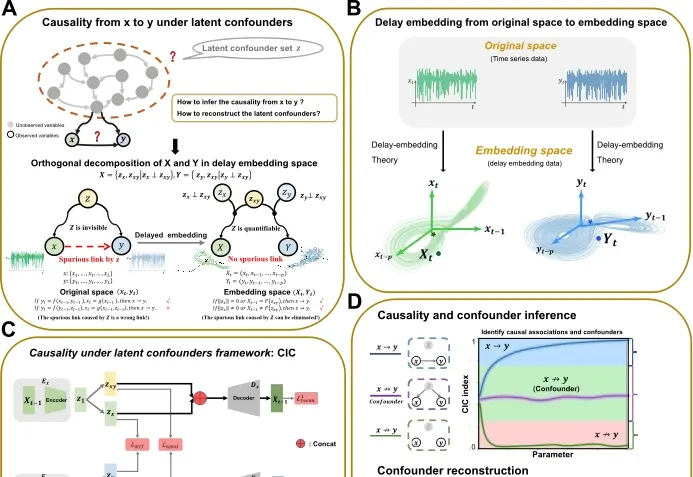
TPAMI 2026 | 仅用两个变量破解混杂因素:CIC实现动力学因果推断与混杂变量重构
TPAMI 2026 | 仅用两个变量破解混杂因素:CIC实现动力学因果推断与混杂变量重构
10151
AI技术研报
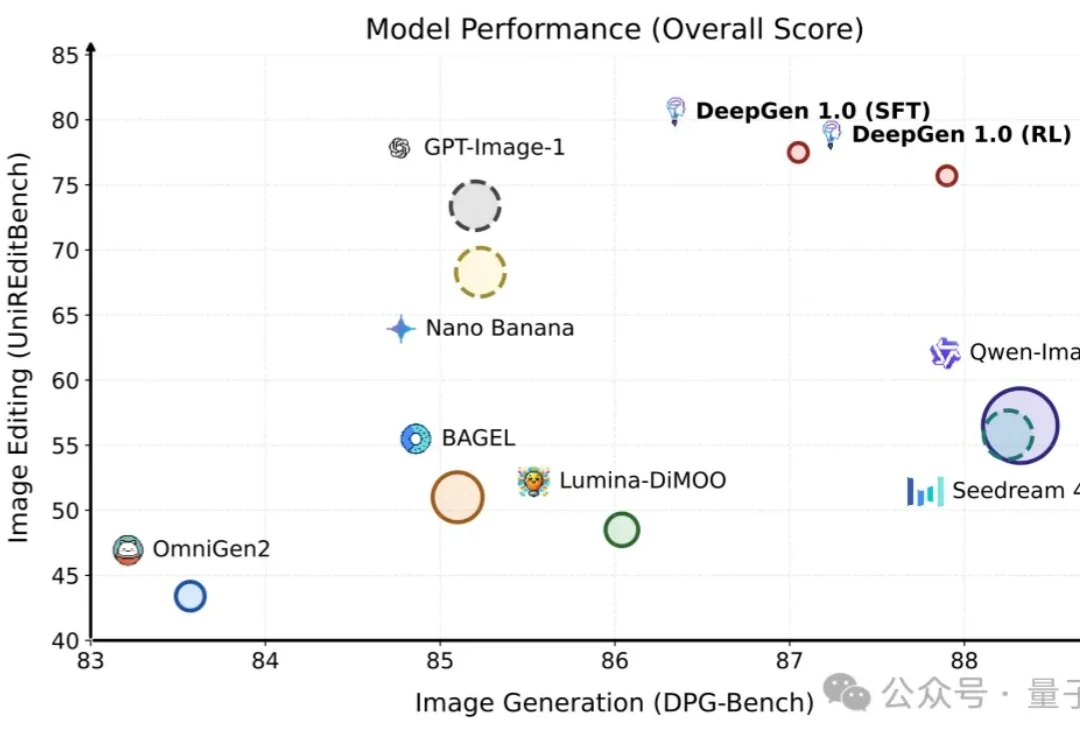
5B参数+4060Ti,10秒出图,全流程开源可复现!补齐统一多模态生成编辑的开源版图,让高质量图像生成真正变得更轻量、更普及
5B参数+4060Ti,10秒出图,全流程开源可复现!补齐统一多模态生成编辑的开源版图,让高质量图像生成真正变得更轻量、更普及
10397
AI技术研报
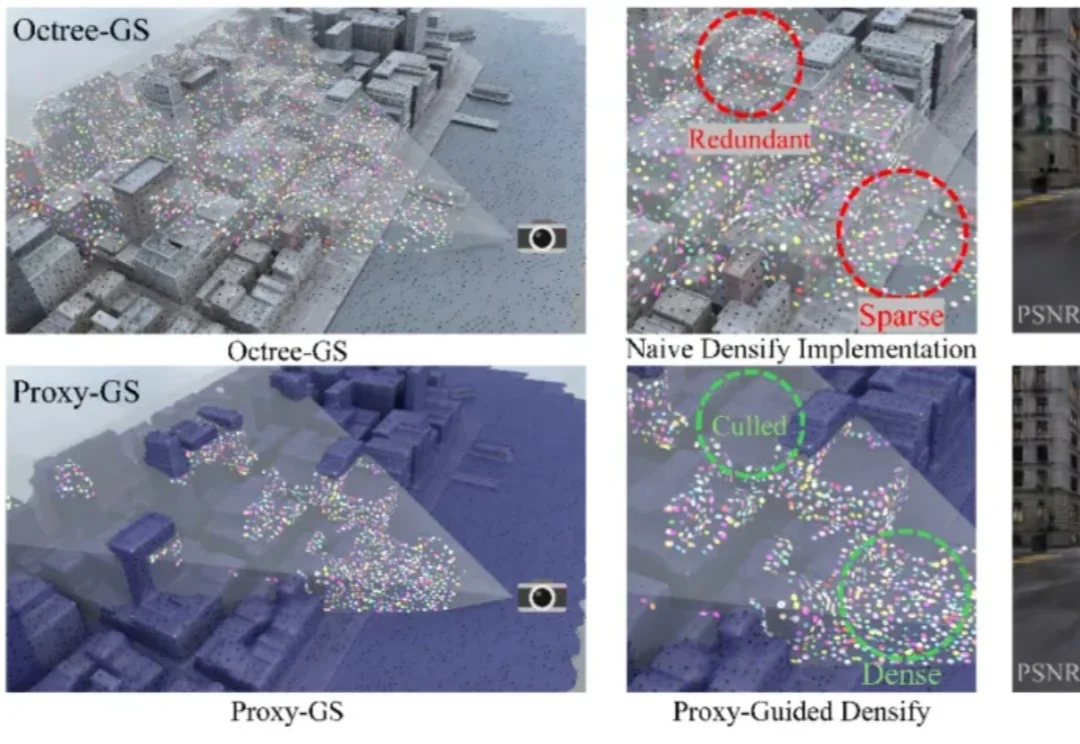
CVPR2026满分论文:Proxy-GS为结构化3D高斯溅射引入统一遮挡先验
CVPR2026满分论文:Proxy-GS为结构化3D高斯溅射引入统一遮挡先验
9509
AI技术研报
LaPha:你的Agent轨迹其实嵌入在一个Poincaré球?
LaPha:你的Agent轨迹其实嵌入在一个Poincaré球?
6310
AI技术研报
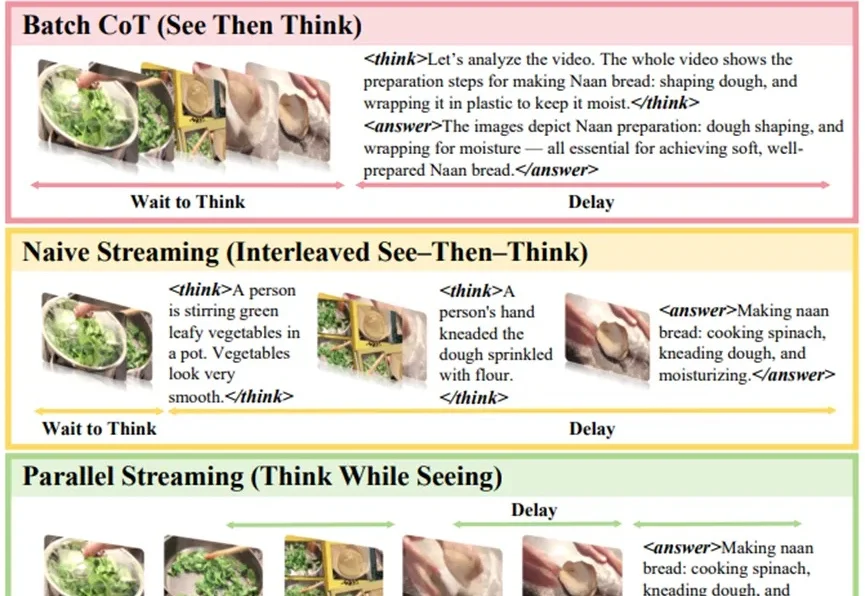
打破视频推理「先看后想」惯性,实现真正的「边看边想」丨CVPR'26
打破视频推理「先看后想」惯性,实现真正的「边看边想」丨CVPR'26
7312
AI技术研报
上一页
当前第85页,共666页
下一页
沪ICP备2023015588号