AI资讯新闻榜单内容搜索-视觉
站点导航
首页
AI资讯
AI技术研报
AI监管政策
AI产品测评
AI商业项目
AI产品热榜
AI专利库
AI需求对接
APP 下载
iOS 下载
安卓下载
# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
清空
确定
AITNT
未登录
退出
验证码登录
×
发送
登录即代表您已同意AITNT
用户协议
和
隐私政策
登录
搜索: 视觉
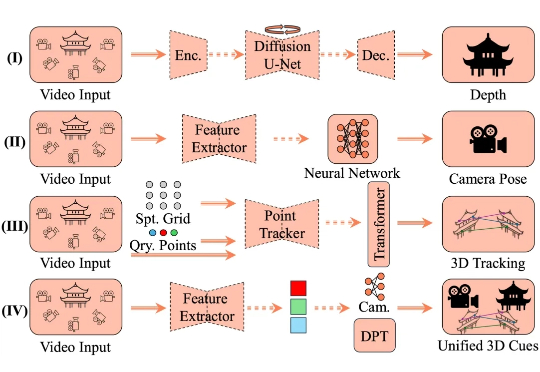
4D空间智能:AI如何一步步「看懂」时空结构?一篇综述解析通往四维世界的五大层次
4D空间智能:AI如何一步步「看懂」时空结构?一篇综述解析通往四维世界的五大层次
8847
AI技术研报
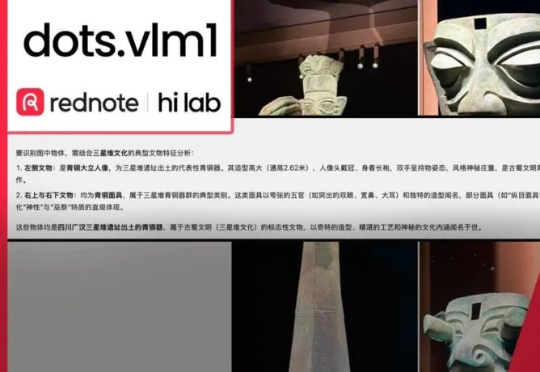
刚刚,小红书开源了首个多模态大模型dots.vlm1,性能直追SOTA!
刚刚,小红书开源了首个多模态大模型dots.vlm1,性能直追SOTA!
8575
AI资讯
JinaVDR: 一个图文混排文档搜索任务的基准集
JinaVDR: 一个图文混排文档搜索任务的基准集
10941
AI技术研报
豆包悄悄上线的这个新功能,也能用眼睛推理全世界了。
豆包悄悄上线的这个新功能,也能用眼睛推理全世界了。
9938
AI资讯
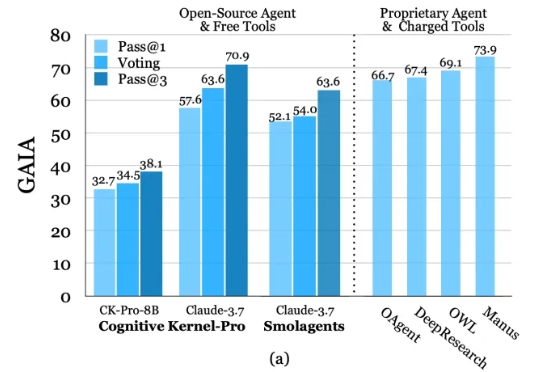
腾讯AI Lab开源可复现的深度研究智能体,最大限度降低外部依赖
腾讯AI Lab开源可复现的深度研究智能体,最大限度降低外部依赖
7582
AI资讯
谷歌深夜放出「创世引擎」Genie 3!一句话秒生宇宙,终极模拟器觉醒
谷歌深夜放出「创世引擎」Genie 3!一句话秒生宇宙,终极模拟器觉醒
10358
AI资讯
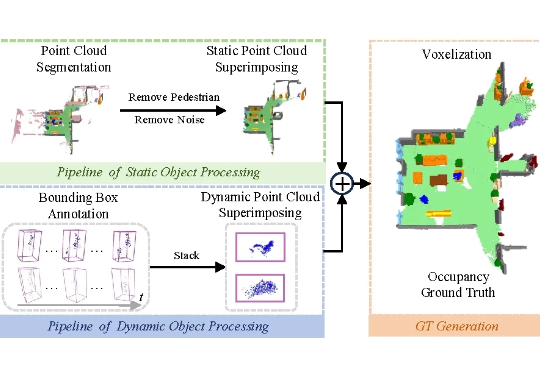
全球首个人形机器人通用视觉感知系统,Humanoid Occupancy建立多模态环境理解新范式
全球首个人形机器人通用视觉感知系统,Humanoid Occupancy建立多模态环境理解新范式
7561
AI技术研报
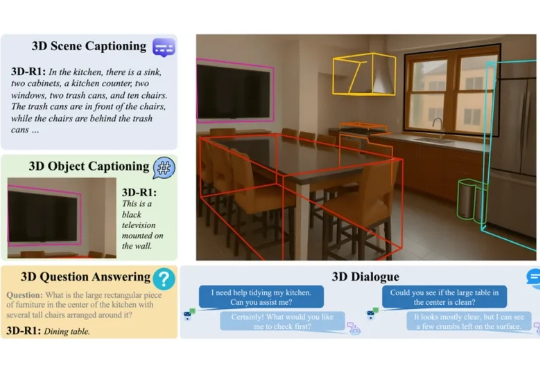
3D-R1:让AI理解3D世界的下一步
3D-R1:让AI理解3D世界的下一步
7274
AI技术研报
机器人不只会抓和放!北京大学X银河通用「世界-动作模型」赋能全面泛化的非抓握技能
机器人不只会抓和放!北京大学X银河通用「世界-动作模型」赋能全面泛化的非抓握技能
7809
AI技术研报
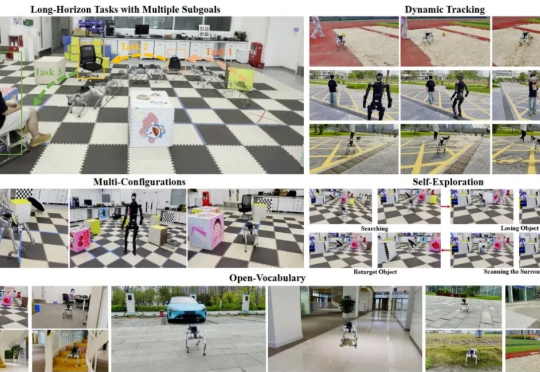
港科大&北京人形提出LOVON:足式机器人开放世界全域目标追踪新范式!
港科大&北京人形提出LOVON:足式机器人开放世界全域目标追踪新范式!
6878
AI技术研报
上一页
当前第21页,共71页
下一页
沪ICP备2023015588号